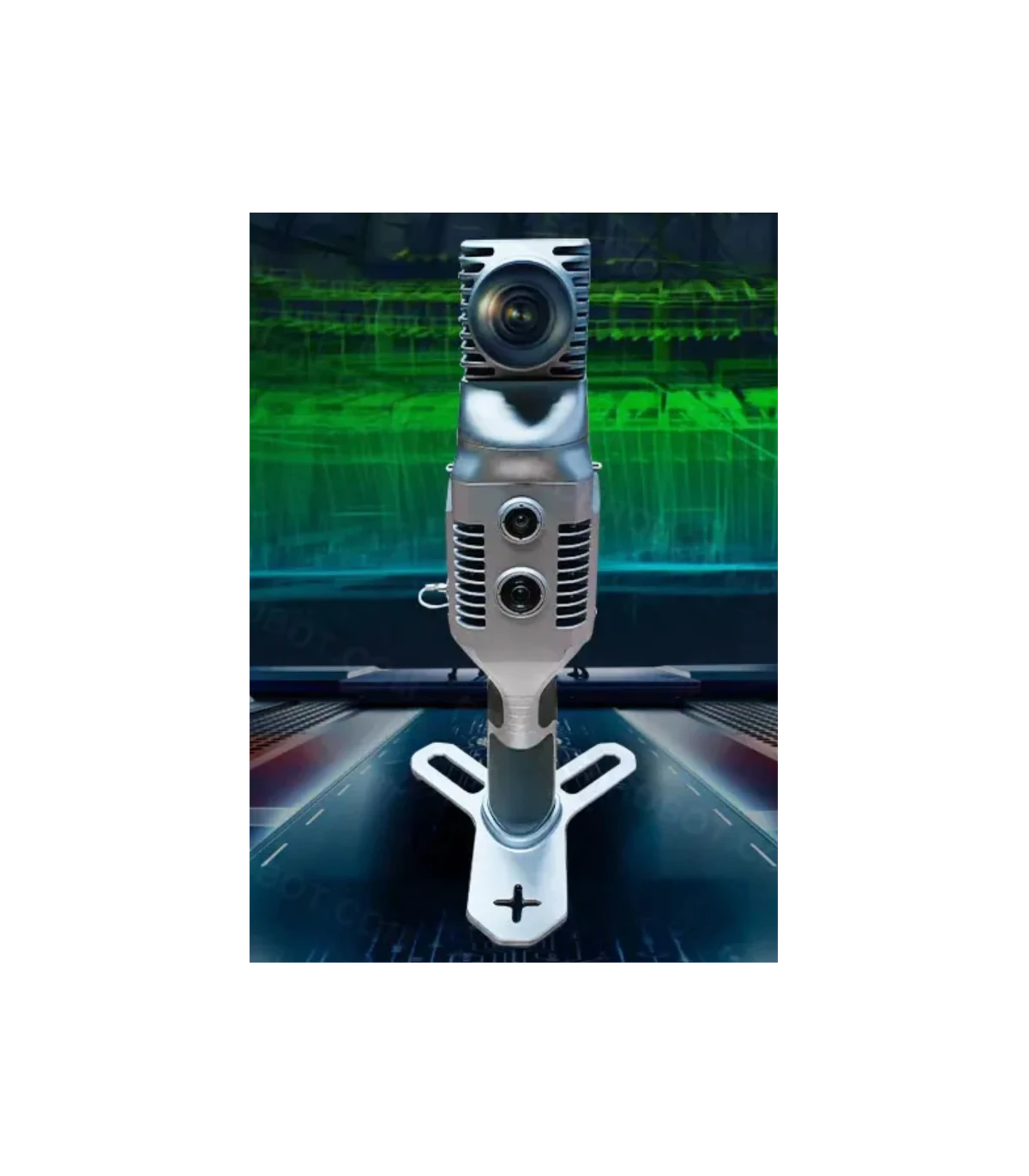
Une cartographie 3D améliorée :
Le scanner est équipé d'une caméra visuelle, accompagnée d’un algorithme SLAM visuel nouvellement développé.
Cette combinaison prévient efficacement des erreurs causées par la répétition ou la non-correspondance structurelle.
Cela améliore considérablement les capacités de cartographie dans des scènes avec des caractéristiques structurelles faibles.
Le G SLAM LT est équipé d’un module informatique haute performance, permettant une cartographie en temps réel pendant la collecte de données, réalisant une capacité de « voir en avançant, obtenir ce que vous voyez ».
De plus, il prend en charge non seulement les modes portatif et sac à dos, mais aussi la numérisation stationnaire basée sur un trépied, permettant l’acquisition de données de nuages de points à densité plus élevée et de haute précision pour répondre aux besoins diversifiés de différentes industries.